























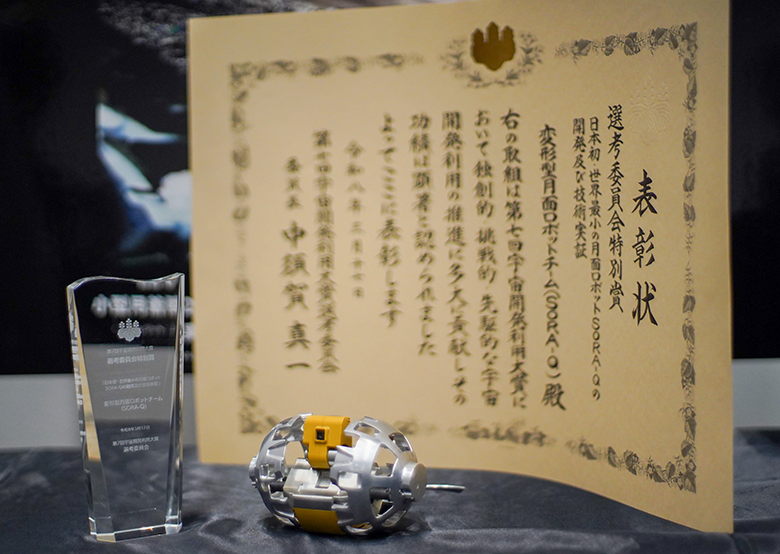
株式会社タカラトミー(代表取締役社長:富山彰夫 /所在地:東京都葛飾区)が、宇宙航空研究開発機構(理事長:山川宏)宇宙探査イノベーションハブ、ソニーグループ株式会社(代表執行役 社長 CEO:十時 裕樹)、同志社大学(学長 小原 克博)の4者で共同開発した変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)、愛称「SORA-Q」、以下「LEV-2」)の開発及び技術検証について、内閣府の主催する第7回宇宙開発利用大賞のうち、独創的・挑戦的・先駆的な宇宙開発利用の推進に多大に貢献したものとして選考委員会特別賞を受賞し3月17日に表彰式が執り行われました。

■宇宙開発利用大賞について
https://www8.cao.go.jp/space/prize/prize.html
宇宙航空研究開発機構(以下「JAXA」)と株式会社タカラトミー(以下「タカラトミー」)、ソニーグループ株式会社(以下「ソニー」)、同志社大学の4者で共同開発した変形型月面ロボットLEV2愛称:SORAーQ)は、内閣府の主催する第7回日本オープンイノベーション大賞のうち最も優れたものとして表彰される内閣総理大臣賞を受賞し、2月5日に表彰式が執り行われました。
タカラトミーの玩具技術、同志社大学の小型ロボット開発技術および、ソニーのIoTデバイス・イメージセンサ・画像処理技術をJAXAが有する宇宙関連技術と融合させ、超小型・軽量にも関わらず月面を安定的に走行して自律制御で動作できるロボットLEV2を開発したことが、オープンイノベーションによる成果として評価され今回の受賞となりました。

■日本オープンイノベーション大賞について
https://www8.cao.go.jp/cstp/openinnovation/prize/index.html
月着陸実証機SLIMの
ピンポイント着陸というミッションにおいて、
「LEV-2(SORA-Q)」が
大きな貢献を果たせた事を
大変嬉しく思います。
これにより
SORA-Qは月面に着陸、撮影した
日本最初のロボットになりました。
今回の成功は
共に夢を追い求めた全ての関係者と
応援して下さった皆様のおかげです。
心より感謝申し上げます。
このSORA-Qプロジェクトの成功が、
世界中の子どもたちが
自然科学に対する興味や関心を持つ
きっかけになることを願うと同時に、
難しい事や新しい事に
挑戦していく事の大切さと、
夢と希望を与え自分自身の未来を
創り出す力を信じる
きっかけとなることを
期待しています。
創業100周年を迎えるこの記念の年に、
生業である“おもちゃ”の技術が
今回の偉業の一翼を担えたことを誇りとし、
私たちはこれからも
「アソビ発」の新たな挑戦を続けてまいります。








JAXA、タカラトミー、
ソニーグループ、同志社大学の
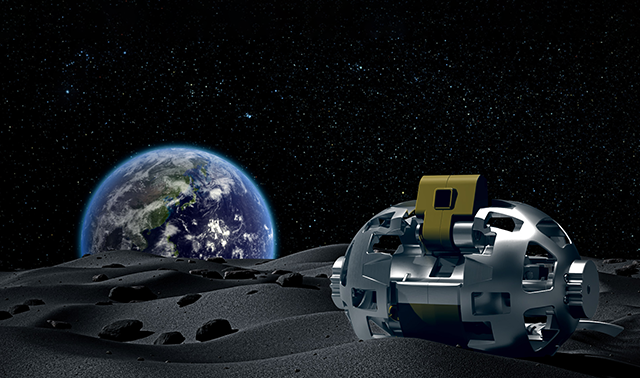
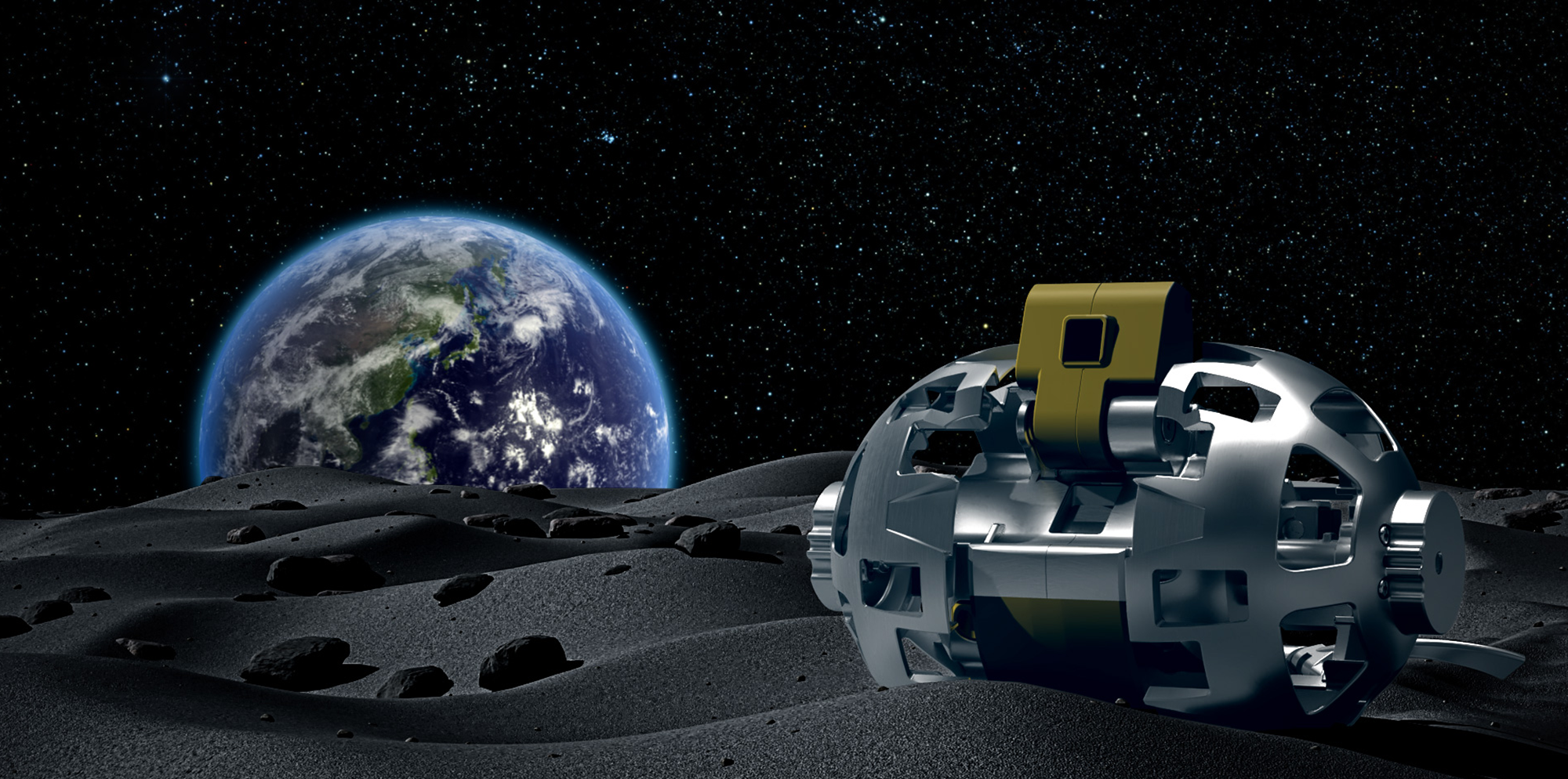
共同開発によって生まれた、
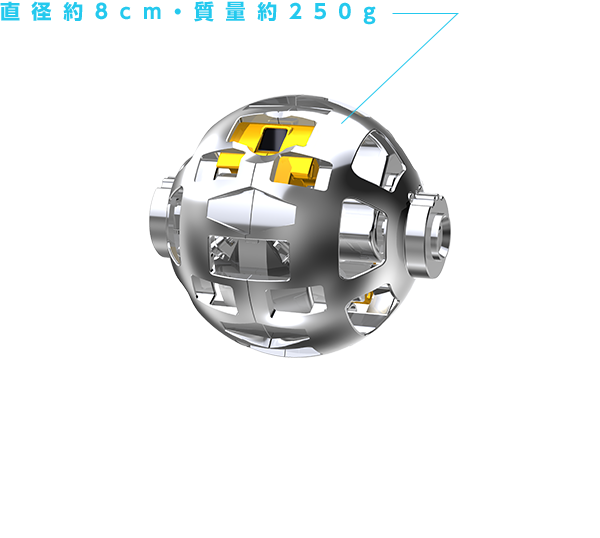
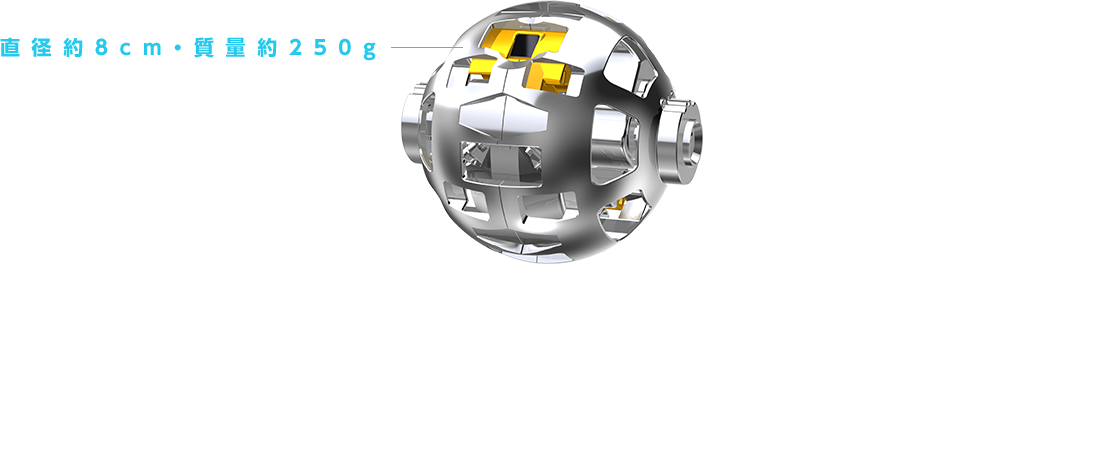
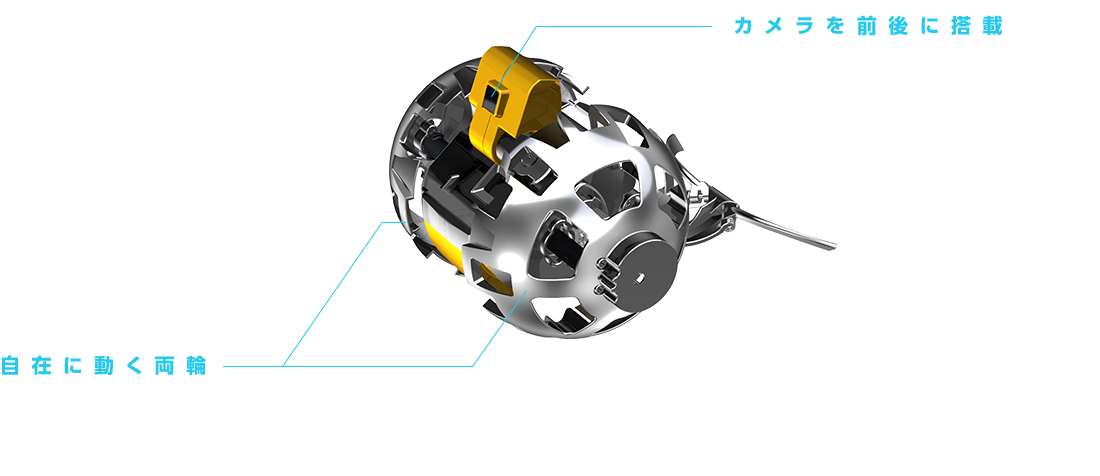
超小型の変形型月面ロボット。
玩具開発によって培われた技術によって
変形機構および超小型・超軽量を実現しました。
SORA-Qは着陸機から球体のまま放出され、
月面に着陸すると変形を開始し、
走行可能な月面ロボットへとその姿を変えます。
SORA-Qを搭載した月着陸実証機SLIMは、
2023年9月7日に種子島宇宙センターから
H-IIAロケット47号機で打ち上げられ、
2024年1月20日に日本で初めて
月面軟着陸に成功しました。
SLIMが着陸する直前にLEV-1と共に
月面へ放出された
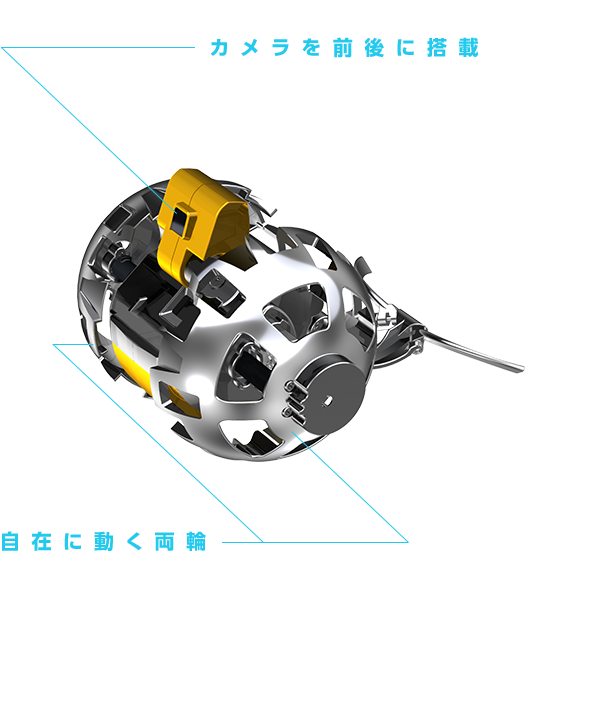
SORA-Qは月面着陸後に
走行モードへ変形し
搭載されたカメラで
着陸機SLIMや周囲環境を撮影しました。
そしてLEV-1に撮影データを送信し、
その後LEV-1の通信機能で
地上にデータを転送しました。
最後にSORA-Qは挙動を停止し、
月に残りました。
JAXAの「宇宙探査イノベーションハブ」
研究提案公募の枠組みの下、
2016年からJAXAおよびタカラトミーが
筐体の共同研究を開始し、
その後、2019年にソニーグループが、
2021年に同志社大学が加わり、
8年以上の月日をかけて
SORA-Qは地球で生まれ、
月面でミッションを達成しました。










SORA-Qのミッションをいっしょに応援してくださる企業や施設(科学館、博物館、プラネタリム等)を募集します!是非ご応募ください!
以下の必要事項をご記入の上、メールにてご応募ください。
ご応募いただきました方には、後日担当よりご連絡を差し上げます。
貴社名(施設名、URL)
ご担当者名
住所
電話番号
メールアドレス
ステッカー配布可否(可 / 不可)
その他取り組みたい内容
(展示、共同プロモーション、その他)

メールを送る

SORA-QのTwitter公式アカウントになりすましたアカウントが確認されています。
見た目がほぼ同じなため間違ってアクセスしてしまうケースがあります。
被害防止のため、偽アカウントのフォローやURLへのアクセスや、締め切りが過ぎたキャンペーンへの応募など絶対にしないでください。
